
This week in EVT EE
(note: this post was written by a new member without a sense of humor)
Preparations to command someone else's magical metal box to use electrons from large energy boxes to spin something.
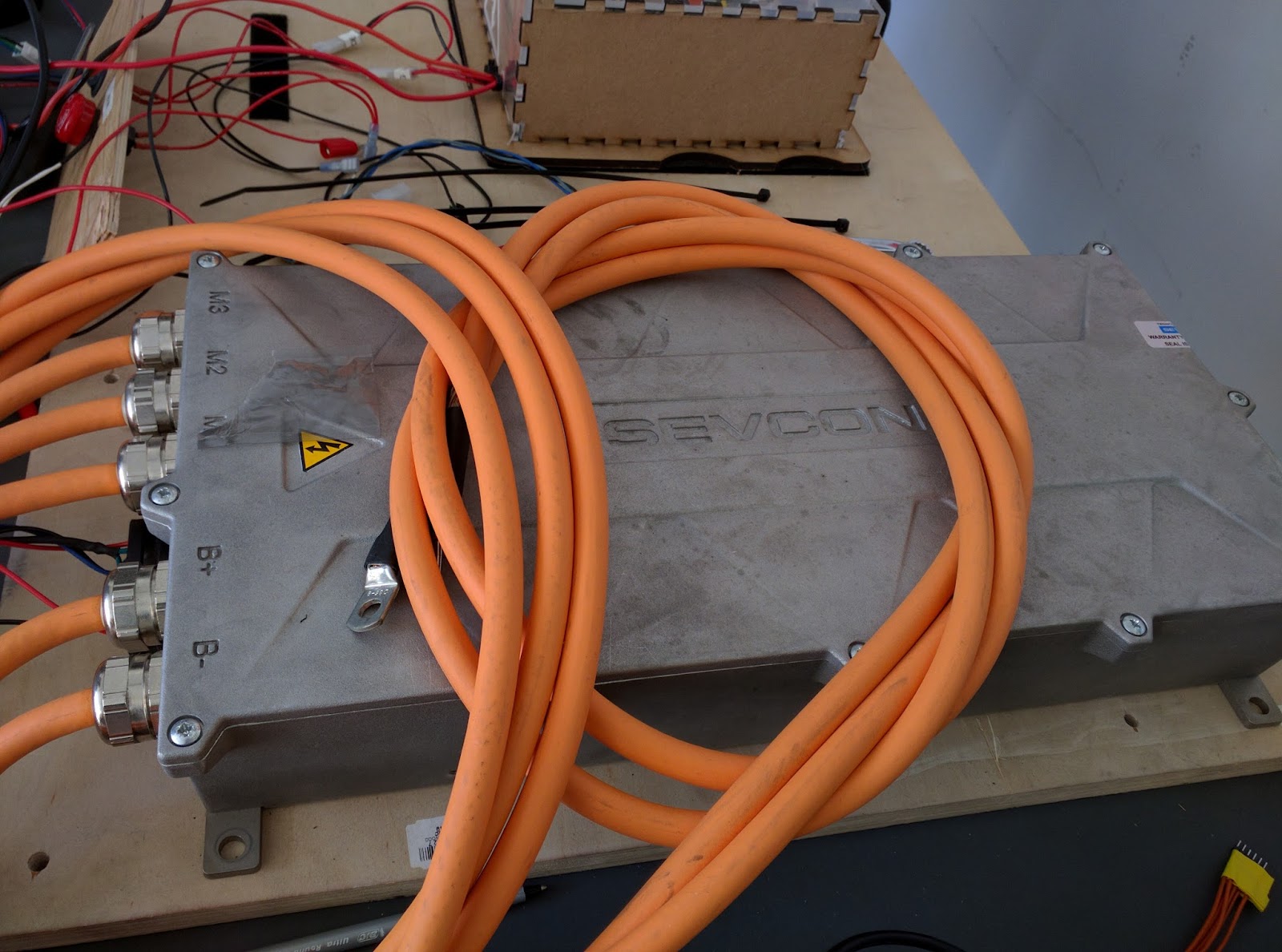
caption: magical metal box; alt-text: Sevcon motor coftroller

{caption: Magical metal box's life support system; alt-text: 12-volt power supply}

{caption: a smaller version of our large energy boxes; alt-text: The real ones are much nicer, I'm told}

{caption: DC and smaller than what we are using, but it still spins right?; alt-text: The real motor is AC and much larger}
Some little metal strings go between our squirrel containment facilities and the giant metal box to allow the magical squirrel inhabitants to talk to each other.

{caption: metal strings; alt-text: wires}
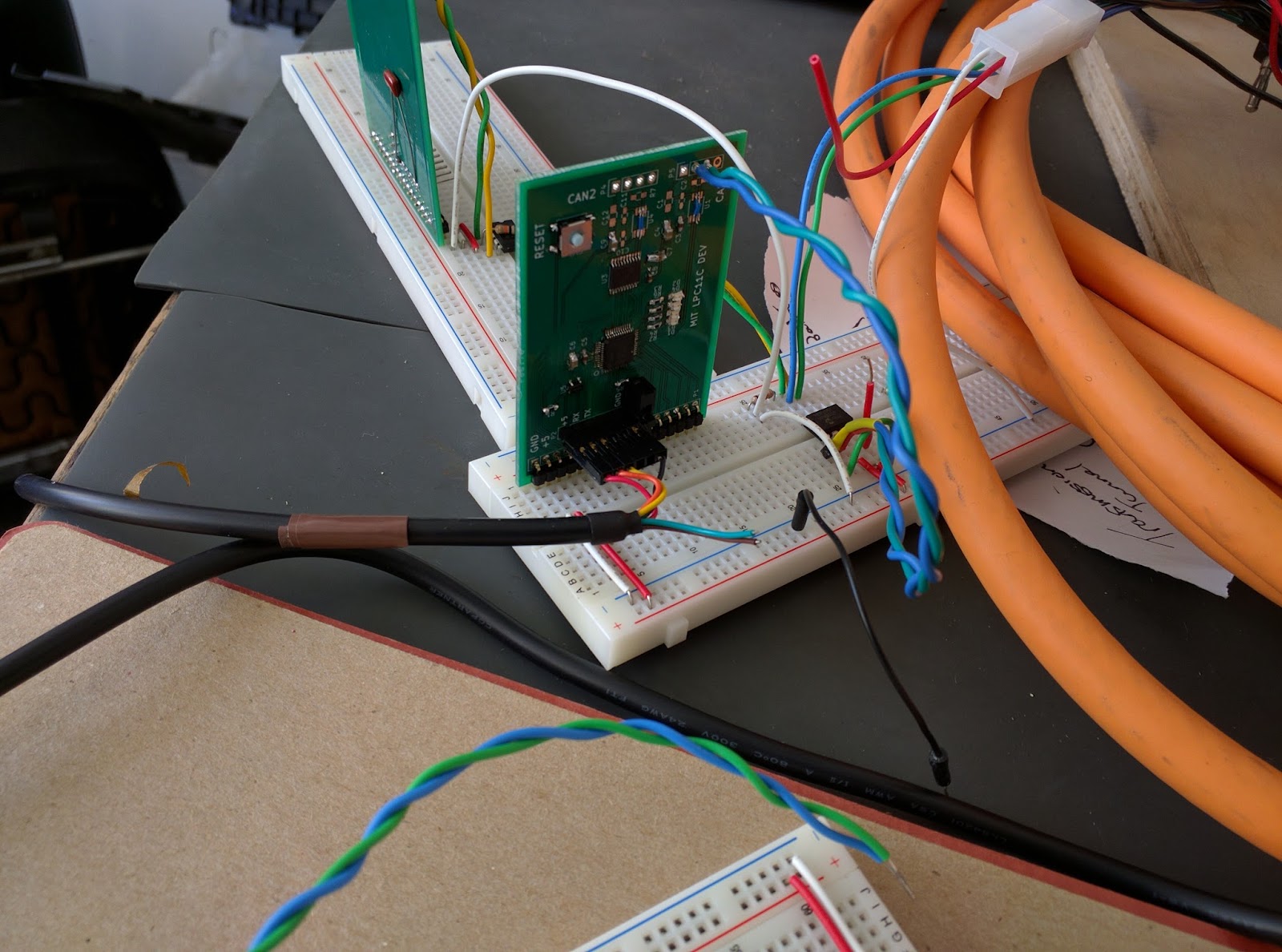
{caption: squirrel containment facility; alt-text: our devboards at work}
The metal box really wants to talk to someone, but our squirrels were deemed too unimportant because they don't know the secret password.
To learn about the metal box, we needed to stare at lines formed by small squares on a glowing rectangle.
Once we decided that the lines failed to contain the information we needed, we pressed large buttons repeatable to create our own lines for another human to interpret.
That human, a person that works with the creators of the magical metal box, will give us the secret password that their squirrels require.
More clear explanation:
This week, we worked with the Sevcon Gen4Size10 motor controller.
It sits on a table with power supplies rather than the actual batteries for testing.
After working for a while to learn how to use CANopen, and reading through the documentation for the motor controller, we began trying to talk to it using our devboards.
We found that the motor controller is in master mode, and tries to send out a SYNC message to tell the other CANopen nodes to talk to it.
After trying to write values to the motor controller to change it's ID, disable the SYNC message, and switch it to slave mode, we found that it was always broadcasting an error message with each attempt.
The error message pointed us to another CANopen index to read, which informed us that we do not have a high enough access level.
In order to change the access level, a password must be provided to the Sevcon.
We have sent an email to a representative at Sevcon asking about the password.








No comments:
Post a Comment