EE Team Updates
Today the EE team converged once again to check in regarding what each of us were working on, if we were stuck on issues, and finally, discuss the very important (and safety critical) shutdown sequence of the car.
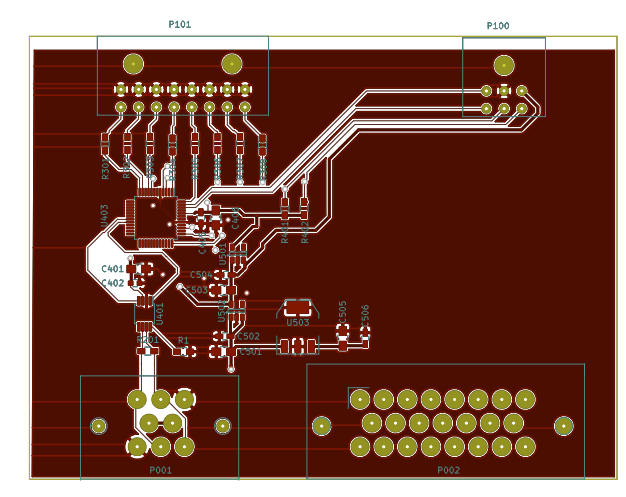
First, Rango discussed a sizing issue that was realized after our newly printed PCB was put into our lovely-looking, insulated PCB enclosure:
The EE team apprised of a redesign: our first printed PCBs had not accounted for the size of the lips/flange of the adaptor connecting the PCB to peripherals, CAN bus, and power lines. As such, the cover to the insulating box surrounding the PCB does not lie flush to the PCB. Unhappiness.
We then went through in detail exactly what sequence of events needs to happen the moment the driver turns the key to “off” (assuming no critical errors initiating or during the shutdown sequence - we’ll handle that next Tuesday). In our discussion, we took into account safety checks, possible design improvements to our sequence, and the conditions necessary to safely turn off the vehicle. The following is the Opel’s democratically-decided shutdown protocol:
The team’s white board design of the checks and action sequence that the car’s driving state machine ought to undergo in order for the car to safely shutdown.
Our team checked in at the beginning of the meeting to discuss their current projects, their short-term goals, and the obstacles that they need to overcome.
Rebecca continued her work on the User Interface Module. Specifically, she is working on getting test examples on the SPI protocol up and running, and beginning to write the code for the User Interface.
Toby is continuing his work on the Power Distribution Module. He is going to add connectors to his computer and experiment with the gauges so that he knows he is able to communicate with them using I2C.
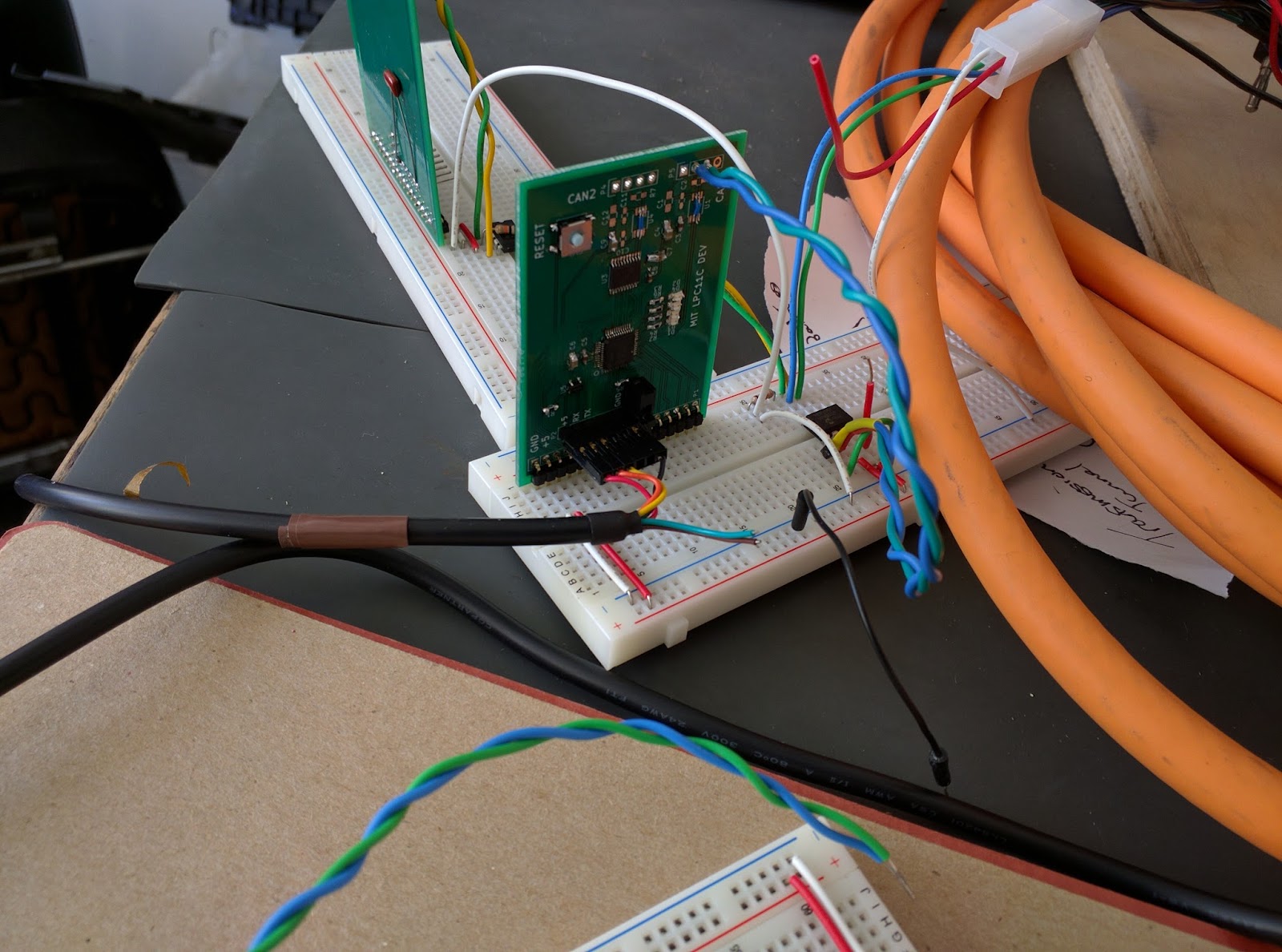
Jonathan located a handful of 2-twisted-wires that we will use to wire the CAN bus. He also started working on matching up pins in each module’s external peripheral/CAN bus connector.
Skanda/Bryson
The Skanda and Bryson duo are writing unit tests for the Driver Interface. Certain functions in their driver utility code currently do not have tests written for them, so they will continue to work on that in the near future and work on implementing the car initialization sequence.
Hugo - electric vacuum pump to buy; pricey, but had all the comments
Hugo was looking for more improved parts to use in our braking system. He found an electric vacuum pump that satisfies all of our requirements and that was more efficient than our previous pump. Even though the part is pricey, he felt that its functionality was worth the cost.
Jordan continued working on designing the circuits used to control the driver interface relays.
Helmuth managed to talk to the motor controller (!), getting a motor interface communication example using CANOpen up and running!
The team is busily working on finishing the OpelGT system modules!